03. Motion Models
Motion Models
Predicting State
Let’s look at the last example.
The initial state of the car is at the 0m position,and it's moving forward at a velocity of 50 m/s.
Let’s assume that our car keeps moving forward at a constant rate.
Every second it moves 50m.
So, after three seconds, it will have reached the 150m mark and its velocity will not have changed (that's what a constant velocity means)!
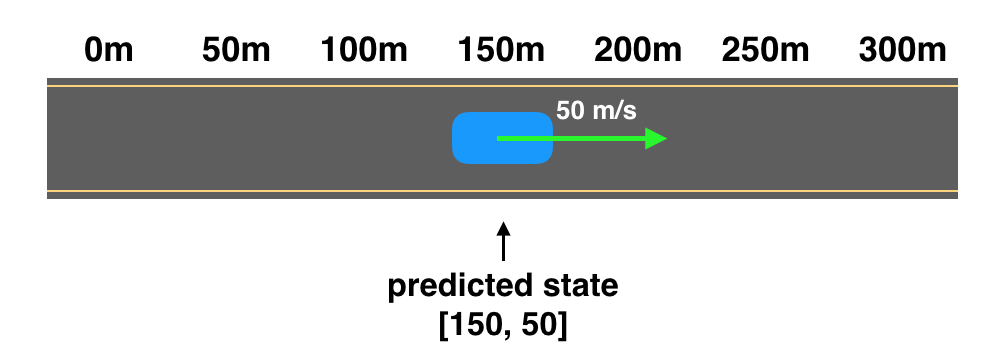
Predicted state after 3 seconds have elapsed.
Its new, predicted state will be at the position 150m, and with the velocity still equal to 50m/s.
predicted_state = [150, 50]Motion Model
This is a reasonable prediction, and we made it using:
- The initial state of the car and
- An assumption that the car is moving at a constant velocity.
This assumption is based on the physics equation:
distance_traveled = velocity * time
This equation is also referred to as a motion model. And there are many ways to model motion!
This motion model assumes constant velocity.
In our example, we were moving at a constant velocity of 50m/s for three seconds.
And we formed our new position estimate with the distance equation: 150m = 50m/sec*3sec.
The Takeaway
In order to predict where a car will be at a future point in time, you rely on a motion model.
Uncertainty
It’s important to note, that no motion model is perfect; it’s a challenge to account for outside factors like wind or elevation, or even things like tire slippage, and so on.
But these models are still very important for localization.
Next, you’ll be asked to write a function that uses a motion model to predict a new state!